你的浏览器禁用了JavaScript, 请开启后刷新浏览器获得更好的体验!
首页
热门
推荐
精选
登录
|
注册
基于Opencv自带BP网络的车标简易识别
立即下载
用AI写一个
金额:
2
元
支付方式:
友情提醒:源码购买后不支持退换货
立即支付
我要免费下载
发布时间:2018-04-26
20人
|
浏览:3868次
|
收藏
|
分享
技术:Opencv+神经网络+HOG特征
运行环境:win10+VS2017+Opencv2.4.11
概述
使用Opencv自带的BP神经网络和人工提取的HOG特征来进行车标分类
详细
> 记得把这几点描述好咯:代码实现过程 + 项目文件结构截图 + 演示效果 # 1.准备工作 ## 1.1 训练集和测试集准备 1. 先将数据集手动划分成训练集和测试集,并分好类,比如第一类就放在文件夹名为`0`的文件夹下,第二类就是`1`,如此类推。 >当前程序只能处理10类以下车标,因为当前程序逻辑不支持10以上的数字识别(具体可以仔细看下代码) 所有训练集的图片放在`train`文件夹中,测试集放在`test`文件夹下。最终的文件树如下: 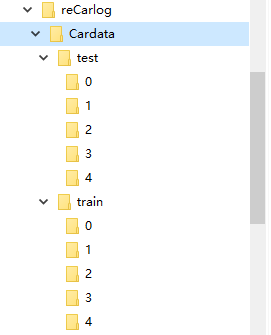 > 1. `reCarlog`是工程名,即`Cardata`和`main.cpp`同目录。 > 2. 测试集的类别数字和训练集的要一一对应。因为程序将要用它们作为分类依据。 2. 在 `main.cpp`目录下准备两个文件,`trainpath.txt`和`testpath.txt`,用以保存所有训练集和测试集图片的路径。程序需要这两个文件来读取训练集和测试集的图片。举例如下(`trainpath.txt`) > ./Cardata/train/0/train_citroen1.jpg > ./Cardata/train/0/train_citroen10.jpg >./Cardata/train/0/train_citroen100.jpg >./Cardata/train/0/train_citroen101.jpg 建议使用相对路径。 这样,当我们读取一张图片的时候,可以利用图片的路径名称,通过`split`调用确定该车标的类别(使用切分字符`'/'`,第4个值即类别(0,1,2,3,4...)) # 2.实现步骤 ## 2.1 代码概览 代码很简单,就一个`main.cpp`文件。大致分为以下3块 - **全局变量**:比如整理好的数据集,标签集,HOG特征向量 - **全局函数**:模块划分,使得`main`函数不显得臃肿。 - **自定义网络类**:`myNeraulNetwork`用于搭建简单BP网络和训练预测 ## 2.2 运行流程 分3步: 1. 训练集装载 2. 定义网络+训练网络 3. 测试网络 ### 2.2.1 训练集装载 全局变量设定: #define N_SAMPLE 1000 #define F_NUM 1764 #define CLASSNUM 5 float Data[N_SAMPLE][F_NUM]; // 数据存放 float Label[N_SAMPLE][CLASSNUM] // 标签存放 训练网络输入是两个二维矩阵,第一个矩阵是数据矩阵(第一维是样本个数`N_SAMPLE`,第二维是每个样本的特征向量是,宽度为`F_NUM`),第二个矩阵是标签矩阵,对应每个样本,都有一个类别标签,如果是第一类,则它的标签向量为`1,0,0,0,0`(本例是5维)。 这里主要提一下数据矩阵的第二维是怎么确定的。 >每个样本的特征向量即每张图片的HOG特征。HOG特征是一个一维向量。 #### HOG特征维度确定 对于一张图片,使用一个滑动窗口以一定的步进滑动,分别获取每个窗口的特征值,是一般的人工图像特征提取方式。简单说下HOG特征的提取。 假设一张图片的维度是`img_size=64x64`,我们使用的滑动窗口大小为`block_size=16x16`,滑动步进`stride=8x8`,那么对一个这样的图像,能得到`(64-8)/8 x (64-8)/8=7x7=49`个窗口,对于每个窗口`block`,HOG特征细分为胞元`cell_size=8x8`。于是一个`block`就有`2x2=4`个胞元,每个胞元默认有`9`个特征值,所以在上述参数的情况下,HOG特征的维度为`49x4x9=1764`,这也是本工程的默认参数。 >opencv自带HOG特征提取,`img_size`、`block_size`、`stride`和`cell_size`都需要自行设定,因此需要事先计算好特征维度,才能确定数据矩阵第二维的宽度。 #### 装载过程 read trainpath.txt; // 读取路径文件 for each trainImg in trainpath.txt : getHOG(trainImg) // 获取HOG特征 getLabel according to its path put its hog into Data[][] put its label into Label[][] ### 2.2.2 定义网络+训练网络 对opencv自带网络类进行了简单的封装,如下: 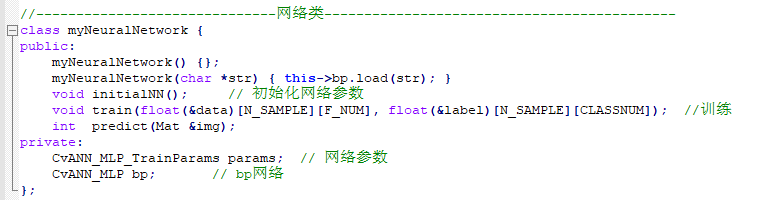 定义和使用代码里说的很清楚了,这里再提下两个构造函数: 带参数的构造函数使用网络参数文件名作为参数。可以直接使用训练好的网络参数文件直接初始化网络,而不需要`initialNN`。 ### 2.2.3 测试网络 读取测试文件,输入网络,获得输出。 >输入为每次一个图片,所以输入的二维矩阵为`test[1][F_NUM]`。`myNerualNetwork().predict(img)`获得一个预测值,可以跟实际值(分析文件路径名获得)做对比,得到分类正确率。 # 3.其他注意事项 - 使用宏定义来进行训练or测试 - Opencv的安装配置查看教程 - 还有其他问题可直接私戳 # 4.运行效果 
本实例支付的费用只是购买源码的费用,如有疑问欢迎在文末留言交流,如需作者在线代码指导、定制等,在作者开启付费服务后,可以点击“购买服务”进行实时联系,请知悉,谢谢
感谢
0
手机上随时阅读、收藏该文章 ?请扫下方二维码
相似例子推荐
评论
作者
西木野Maki
购买服务
购买服务
服务描述:
辅助运行例子;问题解答;资料分享...
服务价格:
¥30
我要联系
2
例子数量
52
帮助
2
感谢
评分详细
可运行:
4.4
分
代码质量:
4.4
分
文章描述详细:
4.4
分
代码注释:
4.4
分
综合:
4.4
分
作者例子
基于Opencv自带BP网络的车标简易识别
C++编写简单的俄罗斯方块游戏





